
Vectors
Addition of Vectors and Multiplication of a Vector by a Scalar
- The unit vector in the direction of \overrightarrow{a} is \hat{a} = \pm \frac{\overrightarrow{a}}{|\overrightarrow{a}|}
- The unit vector parallel to resultant of the two vectors \overrightarrow{a} and \overrightarrow{b} is = \pm \left(\frac{\overrightarrow{a} + \overrightarrow{b}}{|\overrightarrow{a} + \overrightarrow{b}|}\right)
- The unit vector in the XY-plane making an angle θ with the positive direction of x-axis is \overrightarrow{r} = \cos \theta \hat{i} + \sin \theta \hat{j}
- The unit vector in the space making an angles α, β, γ with the positive direction of x, y, z-axis respectively is \overrightarrow{r} = \cos \alpha \hat{i} + \cos \beta \hat{j} + \cos \gamma \hat{k}
- The unit vector which makes equal acute angles with the coordinate axes is \overrightarrow{r} = \frac{1}{\sqrt{3}}\hat{i} + \frac{1}{\sqrt{3}}\hat{j} + \frac{1}{\sqrt{3}}\hat{k}
- If A vector \tt P\left(\overrightarrow{r}\right) which divides the line joining two points A(\overrightarrow{a}), B(\overrightarrow{b}) in the ratio m:n internally, then \overrightarrow{r} = \frac{m\overrightarrow{b} + n \overrightarrow{a}}{m + n}
- If A vector \tt P\left(\overrightarrow{r}\right) which divides the line joining two points A(\overrightarrow{a}), B(\overrightarrow{b}) in the ratio m:n externally, then \overrightarrow{r} = \frac{m\overrightarrow{b} - n \overrightarrow{a}}{m - n}
- The mid point of a line joining two points A (\overrightarrow{a}) \ {\tt and} \ B (\overrightarrow{b}) \ {\tt is} \ = \frac{\overrightarrow{a} + \overrightarrow{b}}{2}
- The position vector of the centroid (G) of the triangle with vertices A (\overrightarrow{a}), \ B (\overrightarrow{b}), c (\overrightarrow{c}) is = \frac{\overrightarrow{a} + \overrightarrow{b} + \overrightarrow{c}}{3}
- The position vector of the centrid (G) of the tetrahedron with vertices A (\overrightarrow{a}), B (\overrightarrow{b}), C (\overrightarrow{c}), D (\overrightarrow{d}) is = \frac{\overrightarrow{a} + \overrightarrow{b} + \overrightarrow{c} + \overrightarrow{d}}{4}
- In the right angles triangle right angle at A orthocentre is A, circumcentre is mid point of hypotenuse
- In the equilateral triangle orthocentre and circumcentre is equal to centroid (G)
- Unit Vector bisecting the angle between the vectors \overrightarrow{a} \ {\tt and} \ \overrightarrow{b} \ {\tt is} \ \frac{\hat{a} + \hat{b}}{|\hat{a} + \hat{b}|}
where \hat{a} = \frac{\overrightarrow{a}}{|\overrightarrow{a}|}, \hat{b} = \frac{\overrightarrow{b}}{|\overrightarrow{b}|} - The vector bisecting the angle between the two vectors \overrightarrow{a} and \overrightarrow{b} is = \lambda (\hat{a} + \hat{b})
where \hat{a} = \frac{\overrightarrow{a}}{|\overrightarrow{a}|}, \hat{b} = \frac{\overrightarrow{b}}{|\overrightarrow{b}|} - If a vector \overrightarrow{a} = (a_{1}, a_{2}, a_{3}) is rotated about x-axis through an angle α, then the new coordinates of \overrightarrow{a} are
(a1, a2 cos α + a3 sin α, − a2 sin α + a3 cos α) - If a Vector \overrightarrow{a} = (a_{1}, a_{2}, a_{3}) is rotated about y-axis through an angle α, then the new coordinates of \overrightarrow{a} are
(−a3 sin α + a1 cos α, a2, a3 cos α + a1 sin α) - If a Vector \overrightarrow{a} = (a_{1}, a_{2}, a_{3}) is rotated about z-axis through an angle α, then the new coordinates of \overrightarrow{a} are
(a1 cos α + a2 sin α, − a1 sin α + a2 cos α, a3) - Let O be the origin, \overrightarrow{OA} = \overrightarrow{a}, \overrightarrow{OB} = \overrightarrow{b} be two vectors, then the point \overrightarrow{Oc} = p \overrightarrow{a} + q\overrightarrow{b} lies
→ inside ΔOAB, if p > 0, q > 0 and p + q < 1
→ outside ΔOAB, but inside \angle AOB if p > 0, q > 0 and p + q > 1
→ outside ΔOAB, but inside \angle OAB if p < 0, q > 0 and p + q < 1
→ outside ΔOAB, but inside \angle OBA if p > 0, q < 0 and p + q < 1 - If \overrightarrow{a} and \overrightarrow{b} are the adjacent sides and \overrightarrow{d_{1}} and \overrightarrow{d_{2}} are the diagonals of a parallelogram then
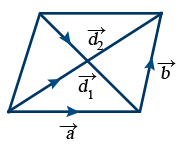
\overrightarrow{d_{1}} = \overrightarrow{a} + \overrightarrow{b}
\overrightarrow{d_{2}} = \overrightarrow{a} - \overrightarrow{b}
\overrightarrow{a} = \frac{\overrightarrow{d_{1}} + \overrightarrow{d_{2}}}{2}
\overrightarrow{b} = \frac{\overrightarrow{d_{1}} - \overrightarrow{d_{2}}}{2}
Part1: View the Topic in this video From 10:05 To 53:36
Part2: View the Topic in this video From 00:40 To 54:37
Disclaimer: Compete.etutor.co may from time to time provide links to third party Internet sites under their respective fair use policy and it may from time to time provide materials from such third parties on this website. These third party sites and any third party materials are provided for viewers convenience and for non-commercial educational purpose only. Compete does not operate or control in any respect any information, products or services available on these third party sites. Compete.etutor.co makes no representations whatsoever concerning the content of these sites and the fact that compete.etutor.co has provided a link to such sites is NOT an endorsement, authorization, sponsorship, or affiliation by compete.etutor.co with respect to such sites, its services, the products displayed, its owners, or its providers.
1. Properties of Vector Addition:
(i) a + b = b + a (commutativity)
(ii) a + (b + c) = (a + b) + c (associativity)
(iii) a + 0 = a (additive identity)
(iv) a + (−a) = 0 (additive inverse)
(v) (k1 + k2)a = k1a + k2a (multiplication by scalars)
(vi) k(a + b) = ka + kb (multiplication by scalars)
(vii) |a + b| ≤ |a| + |b| and |a − b| ≥ |a| − |b|
2. (i) |λ a| = |λ||a|
(ii) λ0 = 0
(iii) m (−a) = − ma = −(ma)
(iv) (−m)(−a) = ma
(v) m(n a) = mn a = n(m a)
(vi) (m + n) a = m a + n a
(vii) m (a + b) = m a + m b